国家授时中心“无溯源参考条件下时间统一系统时间自主同步方法”获国家发明专利授权
近日,由中国科学院国家授时中心时间频率测量与控制研究室研究团队发明的“无溯源参考条件下时间统一系统时间自主同步方法”(ZL201810825290.1)获国家发明专利授权。
时间统一系统是导航系统、航空航天、通信等领域所必需的时间和频率统一的电子设备系统,它需要向更高精度的参考时间溯源。但是,由于溯源比对链路会发生各种故障或者异常使得溯源参考不可用,从而使时间统一系统输出的时间和频率逐渐偏离溯源参考,导致系统无法对外提供准确的时间和频率信号,其可用性大大降低。为解决这一问题,需要研究时间统一系统溯源参考中断时的时间自主保持技术。
近年来,国家授时中心科研人员对时间统一系统自主保持方法进行了深入科学研究及大量试验,提出了基于自回归高精度时差预报的小量步进调整驾驭控制策略的时间自主保持方法。该方法既保证了溯源链路中断时,系统的高精度自主保持能力;同时还避免了信号相位及频率突变,实现了溯源参考恢复后时间和频率平稳、连续的过渡,保证了时间系统的准确性,并提高了其可用性。
本发明可应用于以原子钟为基准的高精度时间频率系统中。目前,已成功应用于在某国家重大专项和上海微小卫星工程中心的地面测试系统中。在溯源链路中断一天情况下,时间同步精度保持在2ns以内。
该发明部分研究成果以《Research on Dynamic Steering Method of Atomic Clock Based on Residual Correction》论文形式发表在期刊《Sensors & Transducers Journal》上,(Vol.238:https://www.sensorsportal.com/HTML/DIGEST/Digest_Nov_2019.htm)该研究得到了国家重点研发计划、中国科学院西部之光等项目的支持。
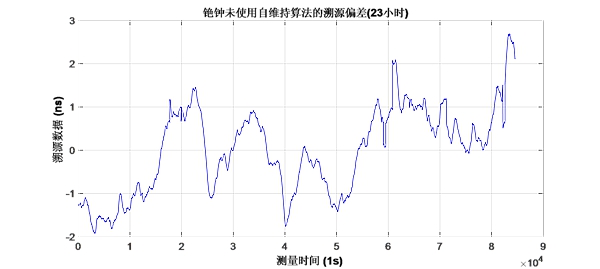
图1 无溯源参考时,未使用自主同步方法铯钟时差变化
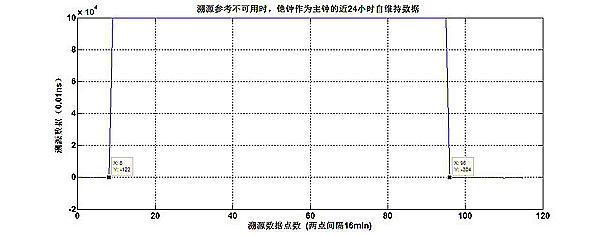
图2 无溯源参考时,使用自主同步方法铯钟时差变化
附件下载:




