应用于黑土地农机作业中的广域天基定位技术取得积极进展
中国科学院国家授时中心的“黑土地广域天基定位技术”研究团队紧密围绕国家“十四五”规划战略部署,针对当前黑土地保护中智能农机作业对高精度定位的需求,展开了复杂场景下多传感器定位技术的研究。为了充分利用各种传感器的测量信息,进一步提高定位结果的稳健性,团队提出了一种新的解决方案——差分GNSS视觉惯性导航系统(DGVINS)。该系统将差分GNSS(DGNSS)、视觉和惯性信息有机地融合在因子图优化框架下,为智能导航应用提供准确、稳健且无缝的位置信息支持。
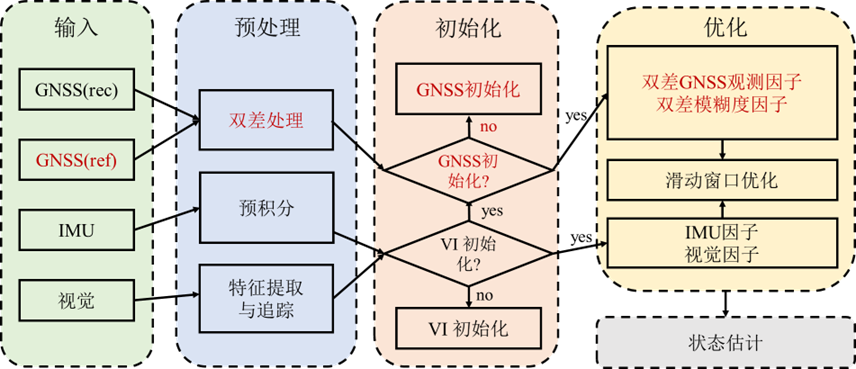
图1 DGVINS流程图
DGVINS中的流程图如图1所示,流程图中的红色模块是主要的创新之处。DGVINS在因子图优化框架内充分利用了所有传感器的测量信息,为了适应复杂环境,在采用GNSS载波相位时,利用单历元模糊度优化来避免周跳检测。利用不同特征数据集,分析了DGNSS、DGNSS+惯导(DGINS)以及标准单点定位+惯导+视觉(GVINS)的算法性能,对比了不同GNSS差分因子组合在不同环境下的表现。实验结果显示,DGVINS在GNSS和视觉挑战性环境中的定位准确性、稳定性和连续性均有显著提升。
在图2中展示了载波相位差分技术(RTK)、GVINS、DGINS、DGNSS和DGVINS在复杂场景实验中的定位轨迹。值得注意的是,由于红色直线部分地图规模较大,因此无法在图中观察到RTK故障的详细细节。而蓝色直线明显偏离的部分代表了DGINS无法解算的时段,这主要是由于挑战性场景和IMU性能的局限所致。此外,图中的两个红色框标注的局部放大图像展示了DGNSS和GINS在具有挑战性场景中的较差性能表现,这些实验轨迹为我们在复杂环境下分析各种定位模式的性能提供了依据。

图3展示了在复杂场景实验中不同定位模式的定位精度。可看出GVINS在该数据集中出现明显故障,其失效时间约为2分钟,约占总运行时间的5%,在GVINS失效期间,定位误差超过100米,这对于任何位置服务来说都是灾难性的。相比之下,在GVINS故障期间,DGVINS在整个场景中都能够稳定运行,并且其精度大多数情况下都优于1m。这项实验不仅突显了DGVINS相对于GVINS具有更好的精度和稳定性,而且展示了它作为一种更具前景的解决方案的潜力,能够实现精确、连续、无缝的定位和导航。
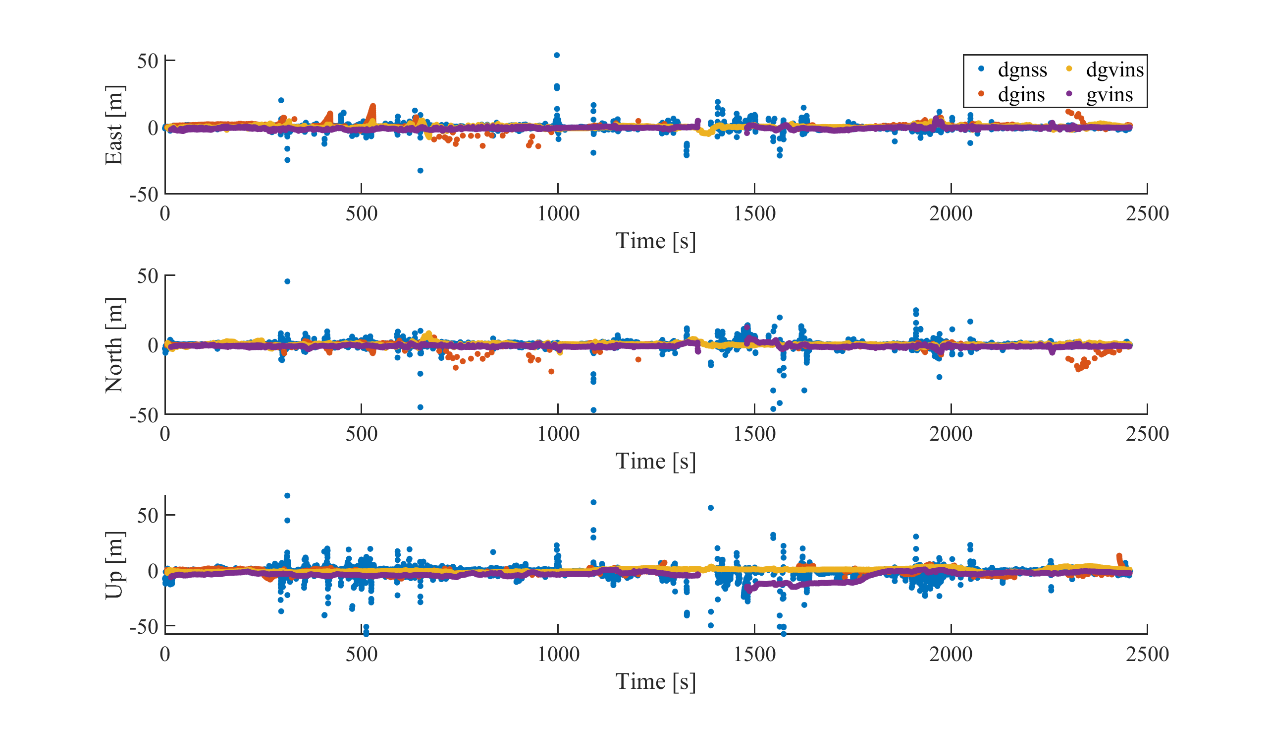
图3 不同定位模式在复杂场景实验中的定位精度
该成果已发表在《Measurement Science and Technology》,中国科学院国家授时中心成芳研究员为相关成果通讯作者,研究得到了中国科学院战略性先导科技专项(XDA28040300)资助。
附件下载:




