海上罗兰系统定位误差建模与校正方法取得进展
近日,中国科学院国家授时中心研究团队提出了一种海上罗兰系统定位误差建模与校正新方法,用于解决罗兰系统信号在传播过程中出现的二次相位延迟误差问题。该方法创新性地采用一阶高斯-马尔可夫过程对信号传播中的时延变化进行动态建模,并引入实时预测机制,从而显著提升了罗兰系统在复杂传播环境下的授时与定位精度。
该团队重点研究了在外部卫星导航系统失效的极端情况下,罗兰系统作为独立授时和定位手段的性能表现。通过深入分析一阶高斯-马尔可夫模型的时间相关特性,构建了一个包含辅助修正因子的预测模型,可有效捕捉和修正二次相位延迟,尤其适用于海洋环境下的应用场景。
实验结果表明,在外部系统支持缺失的条件下,该方法在预测二次相位延迟误差方面仍具备良好的稳定性与精度表现。与现有传统模型相比,其预测误差显著降低,从而实现了更高精度的定位与授时能力。
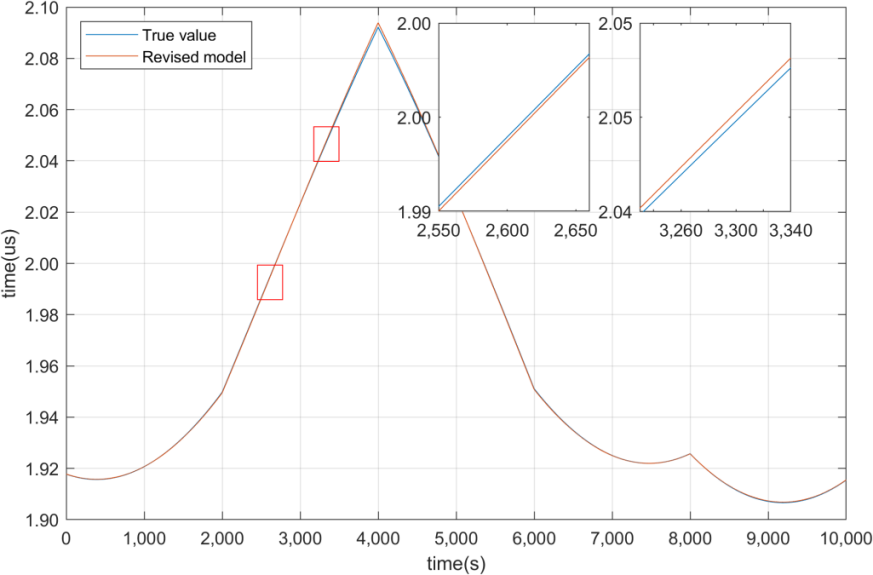
图1 基于一阶高斯-马尔可夫模型预测值的修正效果
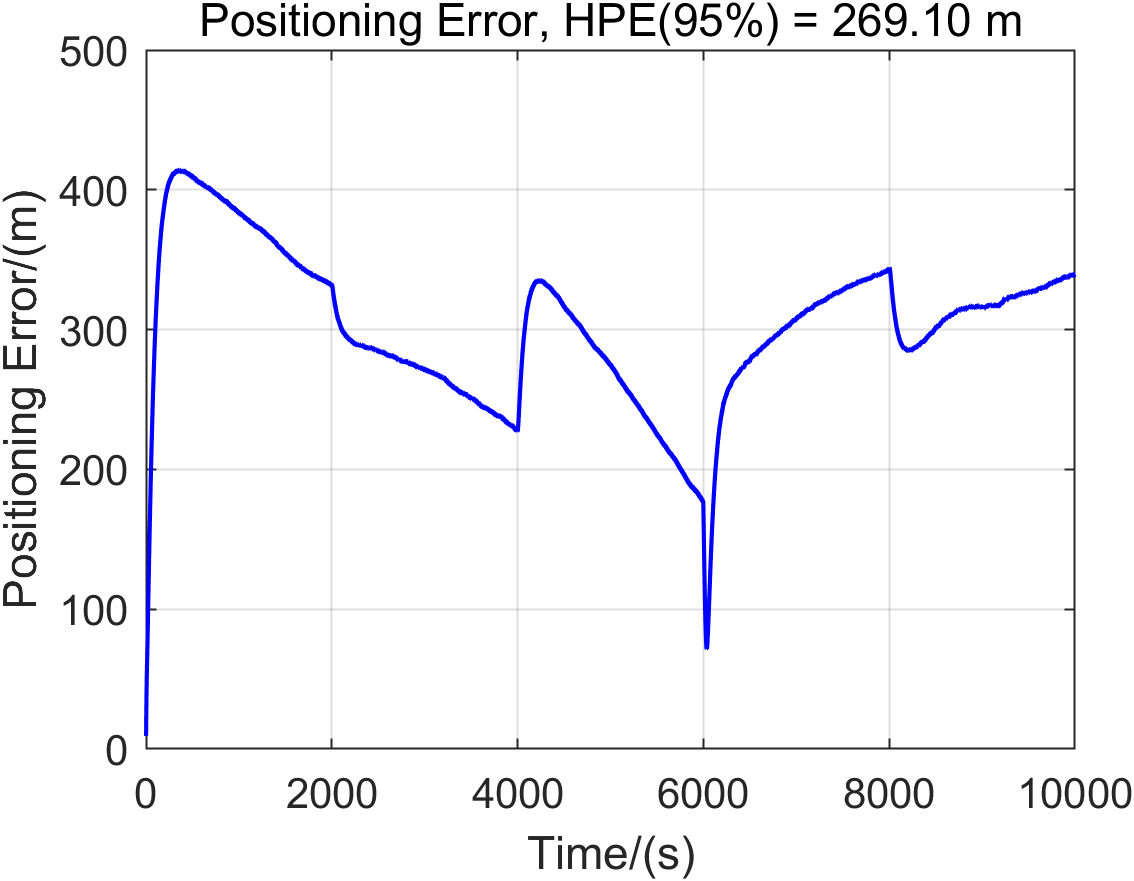
(a)使用传统模型修正的定位误差
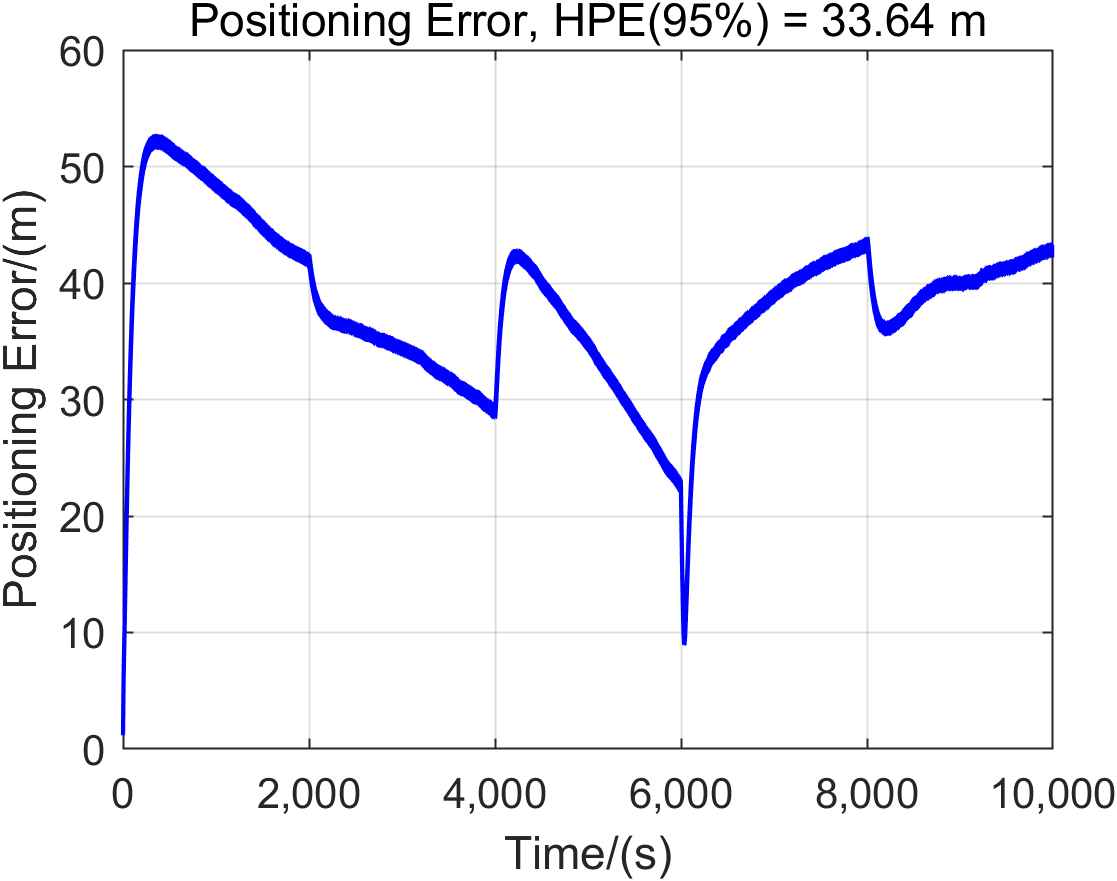
(b)使用一阶高斯-马尔可夫模型修正的定位误差
图2 使用基于一阶高斯-马尔可夫模型修正时延后的定位误差
附件下载:




