基于稀疏低精度位置信息辅助的惯性导航位置校准技术取得新进展
近日,中国科学院国家授时中心科研团队提出并验证了一种新的基于稀疏低精度位置信息辅助的惯性导航位置校准算法,该算法有效抑制了惯性导航误差,为长航时惯性导航应用提供了技术支撑。
惯性导航的优点在于它具有自主性和隐蔽性,不需要发射和接收信号就可以提供载体的姿态速度和位置等全面的导航定位信息,在军事和民用领域得到了广泛的应用,但导航定位误差会随着时间不断累积,这给长航时导航定位应用带来了严峻挑战。为了充分利用惯性导航的优势并避免其不足,一般需要其它信息辅助来抑制惯性导航的累积误差,如卫星导航/惯性导航是非常经典的组合导航模式。但在一些特殊导航应用中,如水下导航,难以获得连续、稳定、高精度的外部参考位置信息,只能不定期获得稀疏、低精度的位置信息,获得参考信息的时间间隔不等,且误差在百米量级甚至更大,如何有效地对这些不理想的位置信息加以利用具有重要的应用价值。
研究团队针对上述问题提出了一种新的综合校准方法,联合惯性导航位置和参考位置进行综合判断,基于惯性导航误差规律,设定合理的判断条件,并选出符合要求的参考位置信息;然后利用符合判断条件的参考位置信息对惯性导航进行校准;最后通过仿真试验验证了该方法的有效性。动态试验结果如图1所示,试验时长为5天,蓝色线表示纯惯性导航定位误差,红色线表示经过综合校准的惯性导航定位误差,定位误差最大值由3.5931n mile降低为1.0581n mile(n mile表示海里,1 n mile≈1852m),定位精度提升了70.55%,试验结果表明该综合校准方法能有效提升惯性导航长航时导航定位能力。
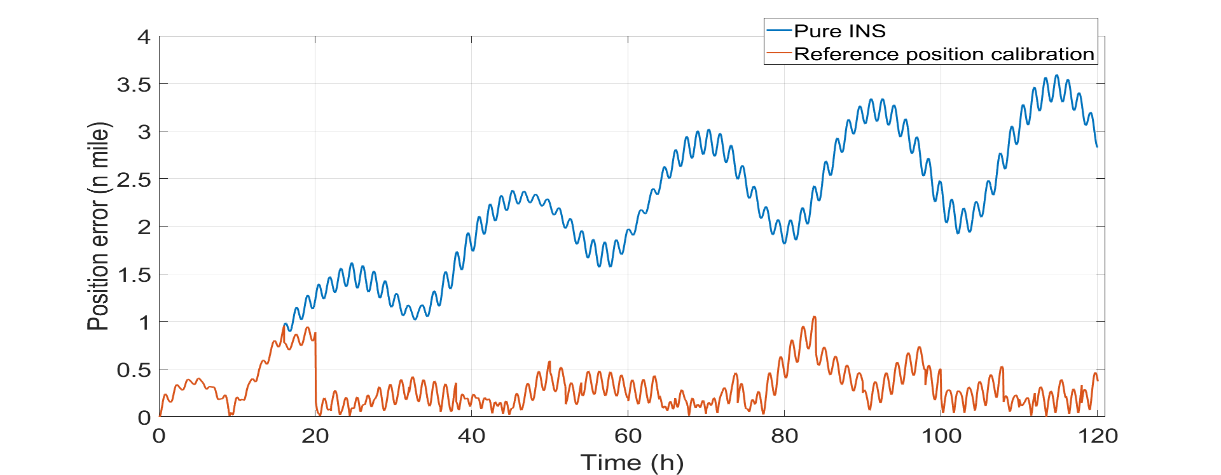
图1 动态试验条件下不同方法位置误差对比分析
相关成果以《Position Calibration Technology for Long-Term Endurance Inertial Navigation Systems Based on Sparse and Low-Precision Position Information》为题发表于期刊Journal of Marine Science and Engineering。
附件下载:




